
 产品:17
产品:17
 联系我们
联系我们

当RobotWare基本系统中添加了 RobotWare-Dispense选项时,确实如此准备好与默认功能一起使用。然而,功能是可以的根据特定的涂胶设备定制选择,这和弧焊功能包类似
2)主要指令有DispL和DispC,其中DispL为走直线,DispC为走圆弧
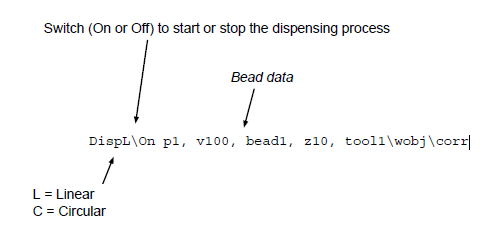
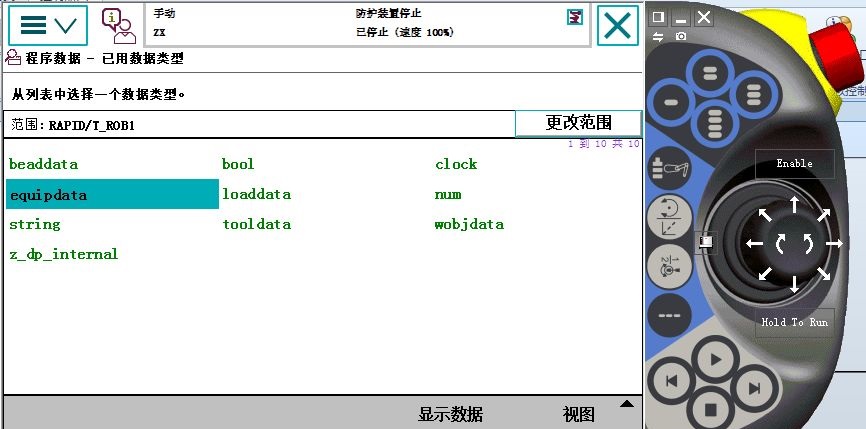
3)分配数据应该在编程之前定义。分配数据是分为两类Equipdata和Beaddata
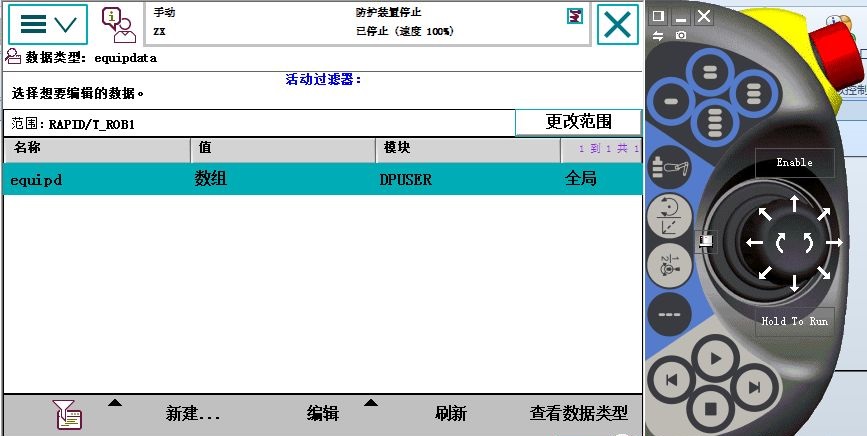
Equipdata(设备)数据用于保存设备的具体数据。这是分配数据不同的beads之间通常不会有差异。***多可以用4个不同的设备。设备1 - 4的设备数据位于一个系统模块DPUSER中的数组(设备)。当前设备数据中的数据在执行分配指令时执行。
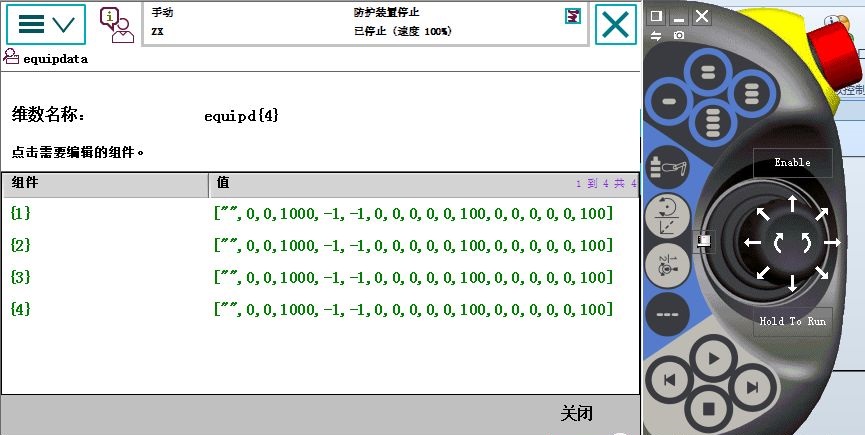

Equipdata数据包含以下数据
info:字符串信息(80char)
on_time:开枪时间
off_time:关抢时间
ref_speed:机器人运动参考速度
.普通IO
本地IO模块,是机器人控制柜上常见的模块之一,或者说是默认必备的模块。常见的有8输入和8输出,或者16输入和16输出;以模拟量的0V和24V,作为数字控制中的和1。在小型系统中,用来快速地连接电磁阀以及传感器,实现夹具等控制,是再方便不过的了。
1.1 IO板介绍
下面就ABB机器人为例子,做简单介绍!
常见的IO板为DSQC系列的,如下图为DSQC652
类似DSQC652的IO板子都是挂载在DeviceNet总线下的。(IO板子需要***的DeviceNet地址)
所以我们需要在ABB机器人中设置地址!
1.2 IO板应用场景介绍
在小型系统中,用来快速地连接电磁阀以及传感器,实现夹具等控制。
控制机器人的启动、停止等基本操作。
更多详情:abb机械手
- 下一篇:ABB机器人的配件
- 上一篇:ABB机器人上海超级工厂